Crean en el MIT una pinza robótica de gran precisión
Los investigadores del MIT crean una pinza robótica que puede desenredar cables delgados. Un día podría ayudar con las tareas domésticas.
Crean en el MIT una pinza robótica de gran precisión
Los investigadores del MIT crean una pinza robótica que puede desenredar cables delgados. Un día podría ayudar con las tareas domésticas.
Los investigadores del Laboratorio de Ciencias de la Computación e Inteligencia Artificial del MIT han desarrollado una pinza robótica con la destreza para manejar objetos delgados como cuerdas y cables, anunció la universidad. La tecnología podría ser utilizada algún día por los robots para realizar tareas domésticas como doblar ropa, o para fines más técnicos como el moldeado de cables.
Los humanos pueden encontrar un desafío en la manipulación de objetos delgados y flexibles, y hacerlo puede ser "casi imposible" para los robots, dijo la portavoz del MIT Rachel Gordon en un correo electrónico. El enfoque estándar había sido que los robots utilizaran "una serie de deformaciones lentas e incrementales", además de accesorios mecánicos, para manipular estos objetos.
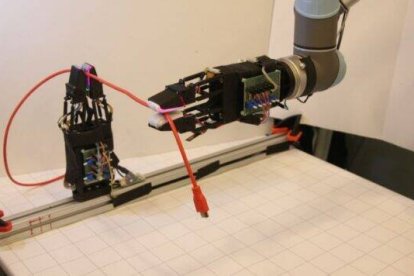
Los investigadores del MIT abordaron el problema desde un ángulo diferente, construyendo una pinza de dos dedos que se asemeja más a los dedos humanos. Los dedos están equipados con sensores táctiles de alta resolución, conocidos como sensores "GelSight", hechos de goma blanda con cámaras incorporadas y montados en un brazo robótico móvil. El sistema tiene dos controladores: uno que modula la fuerza de agarre y otro que ajusta la postura de la pinza para mantener el cable dentro de la misma.
Es difícil para los robots manipular los cables, dijo Gordon, porque la tarea requiere que el robot permita un deslizamiento suave y al mismo tiempo evite que el cable se caiga de los dedos del robot. El robot del MIT fue capaz de realizar de forma fiable unas cuantas tareas, incluyendo encontrar el extremo de un cable de auricular y enchufarlo.
Sin embargo, todavía queda un poco de trabajo por hacer antes de que el robot esté listo para manejar todos nuestros cables USB. El robot tuvo dificultades para tirar de un cable cuando llegó al extremo de un dedo, lo que los investigadores atribuyen a la superficie curvada hacia afuera del sensor GelSight. Están trabajando para ajustar la forma del sensor del dedo para mejorar el rendimiento del robot.